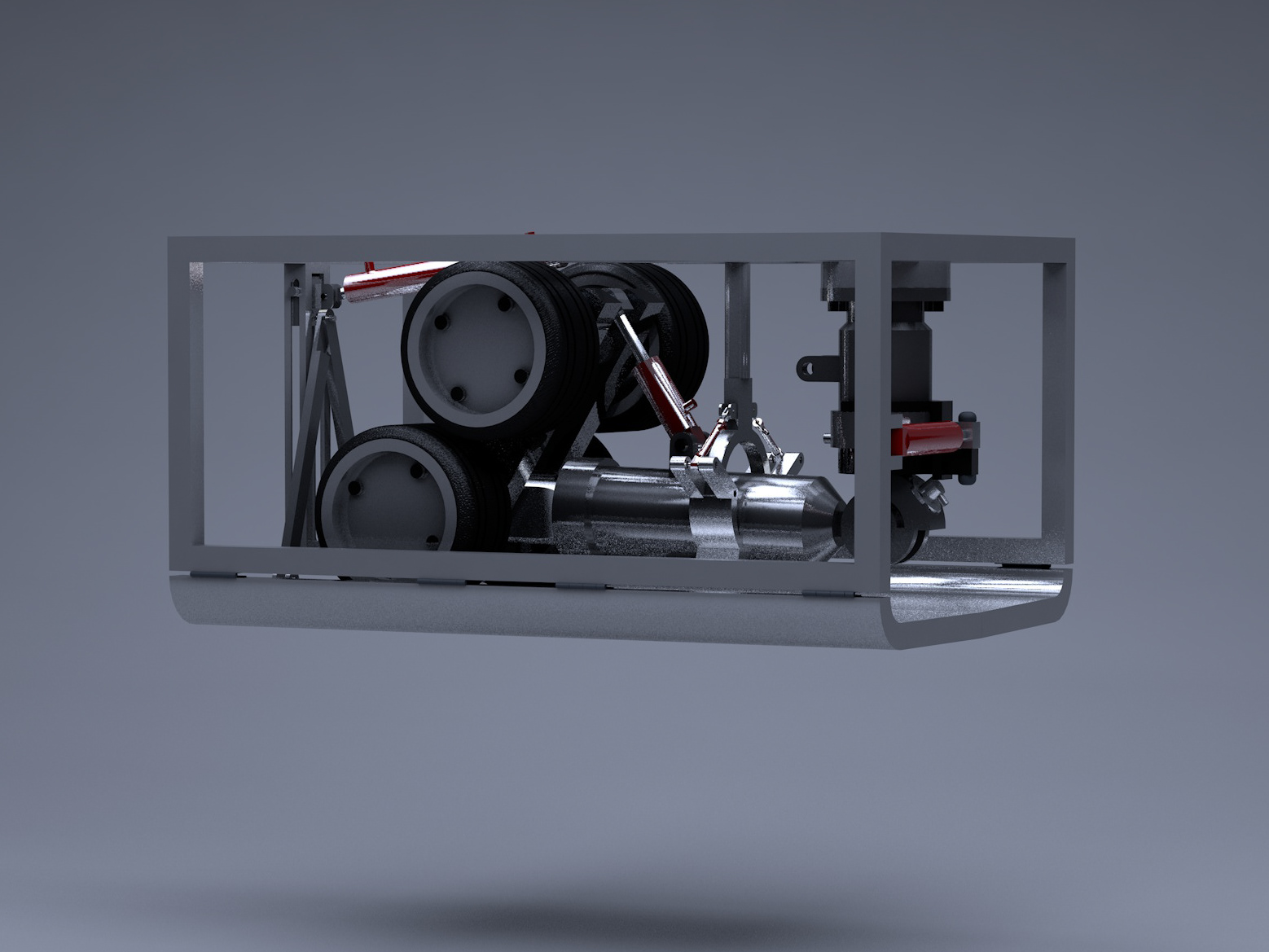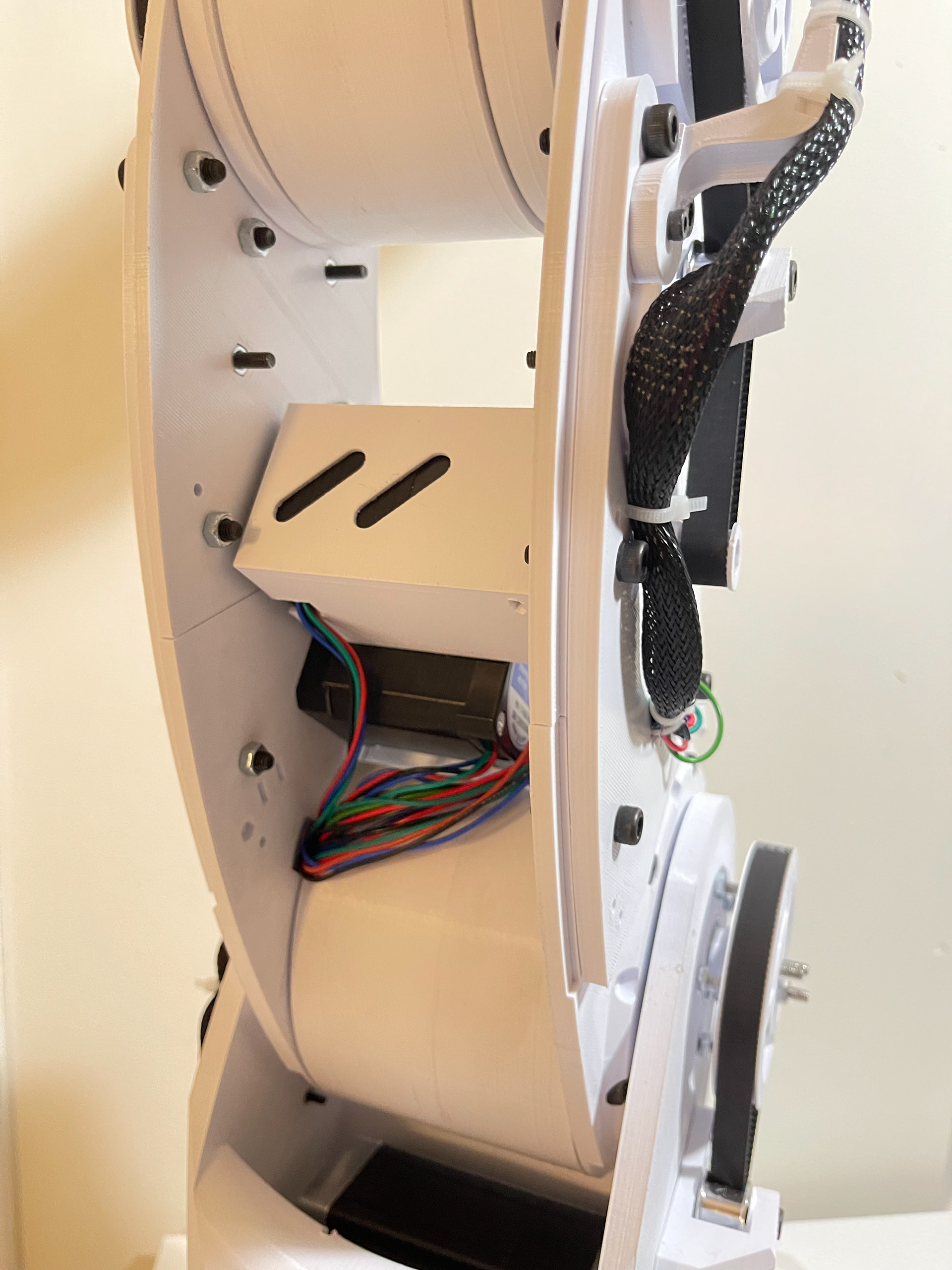
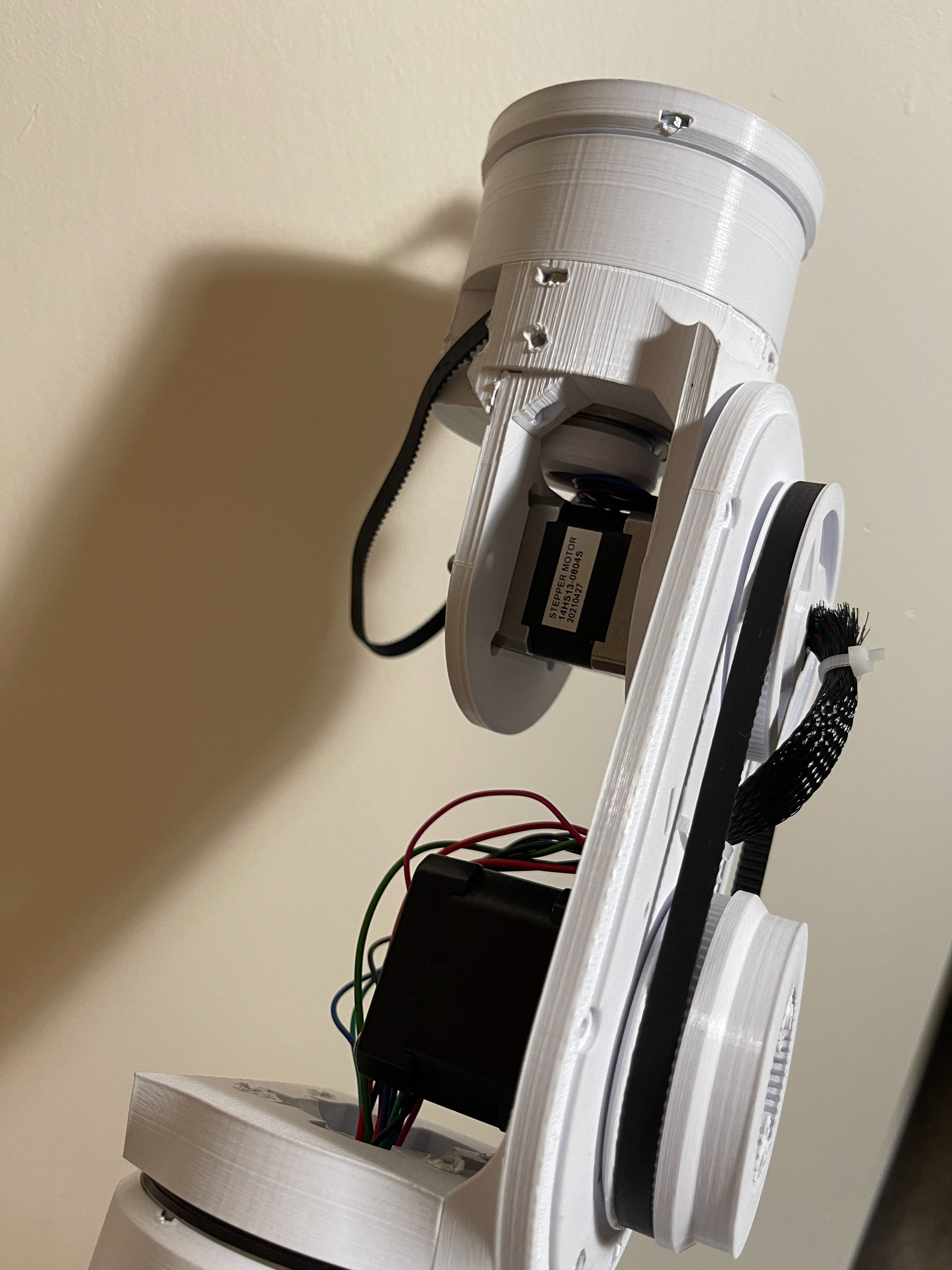
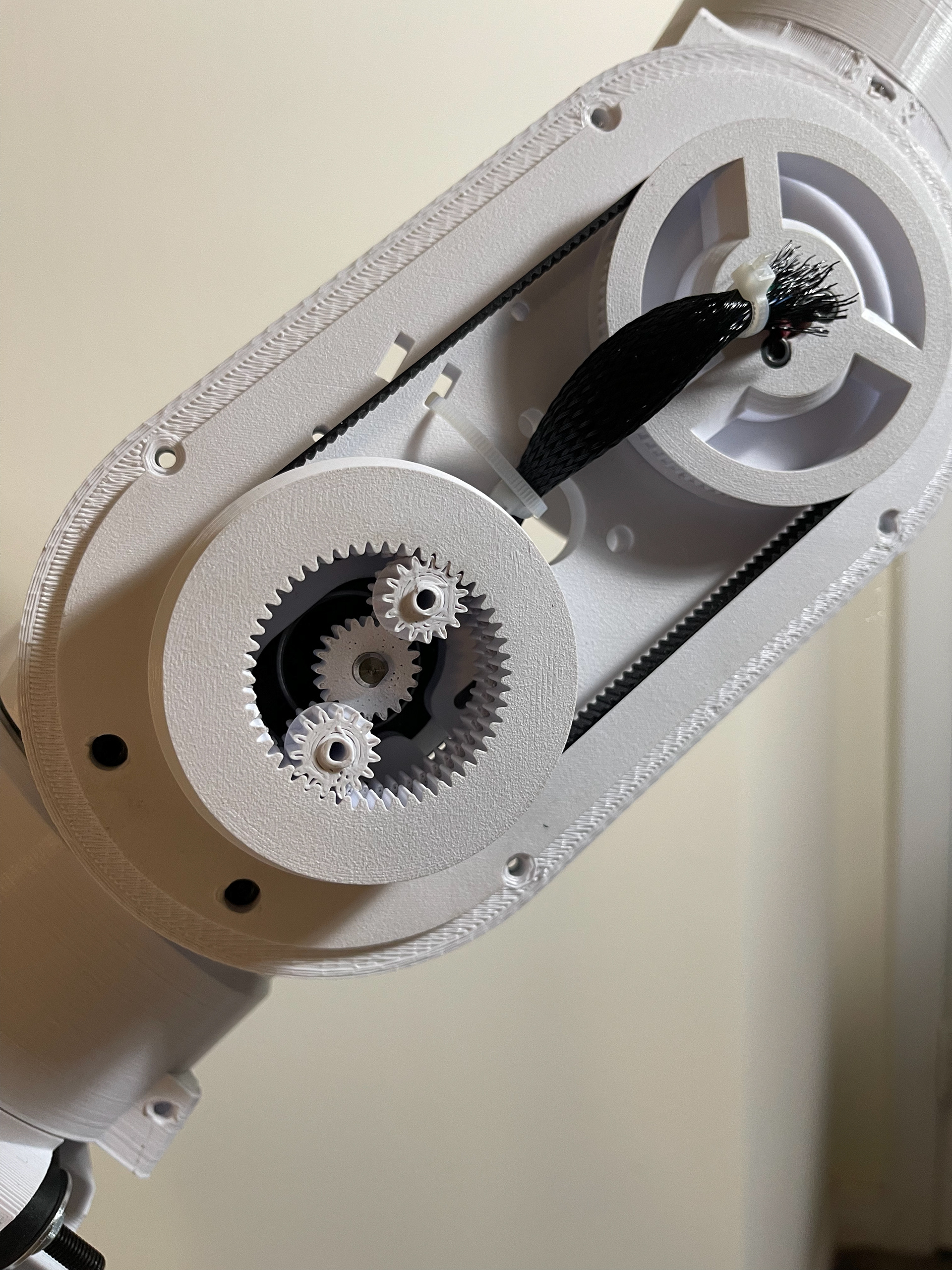


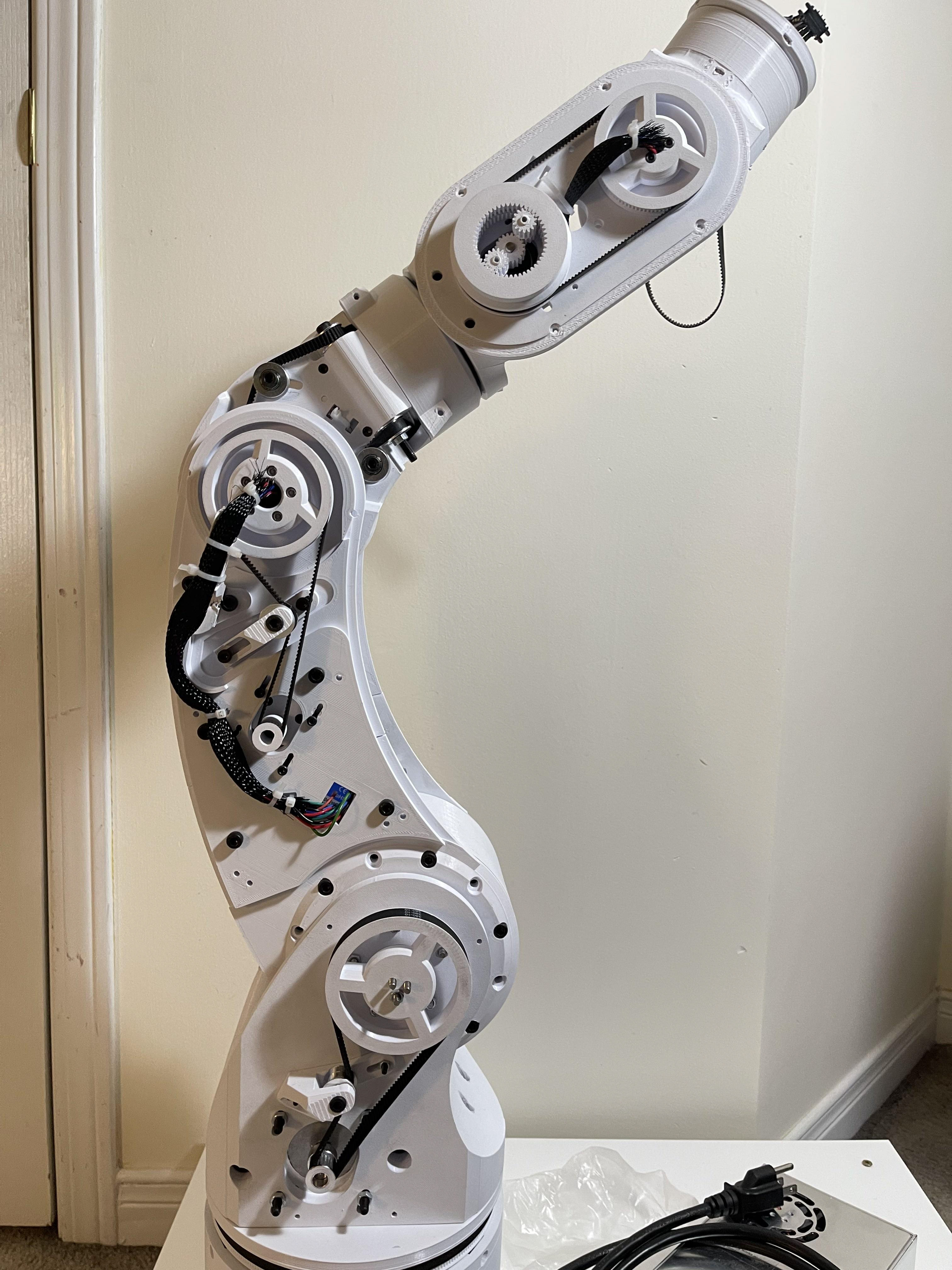
This is robotic arm is fully deigned and constructed by me. The goal of this project was to go deep into creating a more mechanical based arm that contains gearboxes. The other base requirements are to have the arm also have modular end effector that can swapped out with ease and a vision camera for object detection and object comparison.